

Moment
Distribution Method
Moment
‐
Distribution
Method
Structural Analysis
By
Aslam Kassimali
Theory of Structures‐II
M Shahid Mehmood
Department of Civil Engineering
Swedish College of Engineering & Technology, Wah Cantt























































































Study with the several resources on Docsity

Earn points by helping other students or get them with a premium plan

Prepare for your exams
Study with the several resources on Docsity
Earn points to download
Earn points by helping other students or get them with a premium plan
Community
Ask the community for help and clear up your study doubts
Discover the best universities in your country according to Docsity users
Free resources
Download our free guides on studying techniques, anxiety management strategies, and thesis advice from Docsity tutors
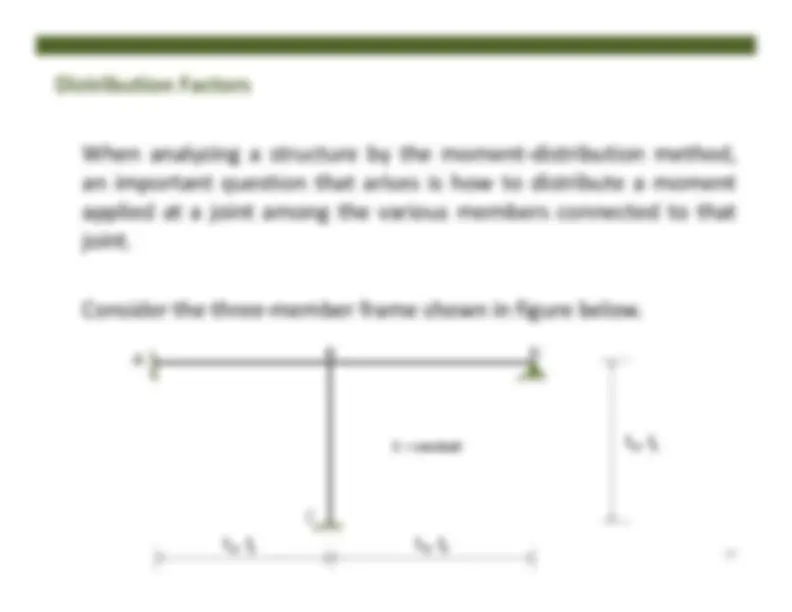
The Moment Distribution Method (MDM) used to determine the end moments of members in a frame. It includes the calculation of distribution factors, fixed end moments, and the balancing of moments at all joints. The process continues until the unbalanced moments are negligibly small.
What you will learn
Typology: Study notes
1 / 97

This page cannot be seen from the preview
Don't miss anything!
Structural Analysis
By
Aslam Kassimali
Theory of Structures
‐II
M Shahid Mehmood
Department of Civil Engineering
Swedish College
of Engineering & Technology,
Wah Cantt
A
B
L
EI = constant
BA
BA
M
BA
= carryover moment
A
B
θ
M = applied moment
M
BA
carryover moment
L
EI = constant
K
A
B
L
EI = constant
rh
r^
rh
hr
^ θ
M θ
M = applied moment
A
B
L
EI = constant
fixed is
member
of
end
far if
θ
hinged is
member
of
end
far if
θ
L EI L
fixed is
member
of
end
far if
hinged is
member
of
end
far if
fixed is
member
of
end
far if
hinged is
member
of
end
far if
A
B
θ
M = applied moment
M
BA
= carryover moment
L
EI = constant
BA
BA
BA
θ
M = applied moment
A
B
L
EI = constant
θ
M
applied moment
fixed is
member
of
end
far if
hinged is
member
of
end
far if
BA
BA
BA
fixed is
member
of
end
far if
hinged is
member
of
end
far if
M
= applied moment
D
B
A
θ
θ
θθ
E = constant
L
, I 2
2
C
L
, I
1
L
, I
3
B
BD
BC
BA
M
BD
BC
BA (
)^
BD
BC
BA
A
B
B
B
D
M
M
BA
M
BA M
BC
M
BD
M
BD
B
M
BC
BD
M
BC
B
17
C
3
3
2
2
1
1
(^
)^
(^
)^
∑ − = + + − =
B
BD
BC
BA
∑
B K
19
(^
)^
(^
)
∑ − = + + − =
(^
)^
(^
)
∑
∑
B
B
BD
BC
B BA
BA
∑
20
B BC
BC
∑