Download Solution Manual to Modern Control Systems Dorf Bishop 12th Edition and more Exercises Advanced Control Systems in PDF only on Docsity!
MODERN CONTROL SYSTEMS
SOLUTION MANUAL
Richard C. Dorf Robert H. Bishop
University of California, Davis Marquette University
A companion to MODERN CONTROL SYSTEMS TWELFTH EDITION Richard C. Dorf Robert H. Bishop
Prentice Hall
Upper Saddle River Boston Columbus San Francisco New York Indianapolis London Toronto Sydney Singapore Tokyo Montreal Dubai Madrid Hong Kong Mexico City Munich Paris Amsterdam Cape Town
P R E F A C E
In each chapter, there are five problem types: Exercises Problems Advanced Problems Design Problems/Continuous Design Problem Computer Problems
In total, there are over 1000 problems. The abundance of problems of in- creasing complexity gives students confidence in their problem-solving ability as they work their way from the exercises to the design and computer-based problems.
It is assumed that instructors (and students) have access to MATLAB and the Control System Toolbox or to LabVIEW and the MathScript RT Module. All of the computer solutions in this Solution Manual were devel- oped and tested on an Apple MacBook Pro platform using MATLAB 7. Release 2008a and the Control System Toolbox Version 8.1 and LabVIEW
- It is not possible to verify each solution on all the available computer platforms that are compatible with MATLAB and LabVIEW MathScript RT Module. Please forward any incompatibilities you encounter with the scripts to Prof. Bishop at the email address given below.
The authors and the staff at Prentice Hall would like to establish an open line of communication with the instructors using Modern Control Systems. We encourage you to contact Prentice Hall with comments and suggestions for this and future editions.
Robert H. Bishop rhbishop@marquette.edu
iii
C H A P T E R 1
Introduction to Control Systems
There are, in general, no unique solutions to the following exercises and problems. Other equally valid block diagrams may be submitted by the student.
Exercises
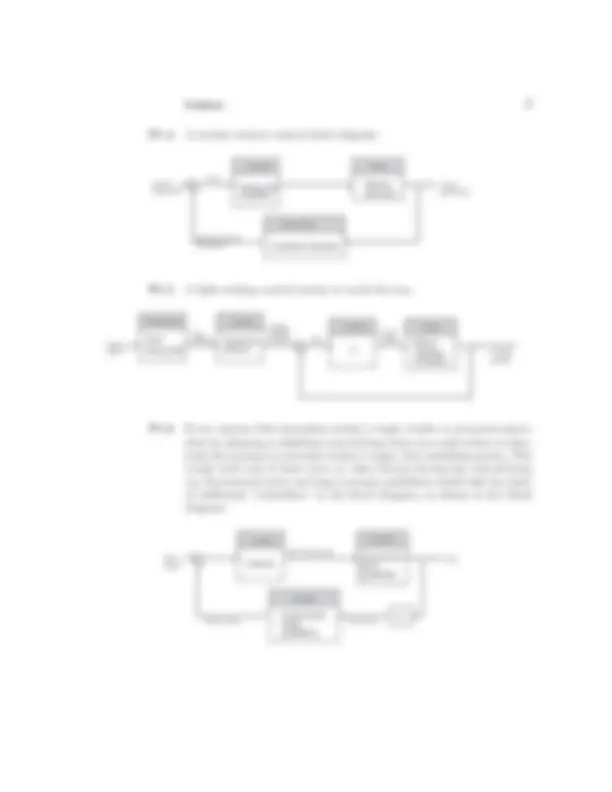
E1.1 A microprocessor controlled laser system:
Controller Error Current i(t) (^) Power out
Desired power output Measured power
Process
processor
Micro-
Power Sensor
Measurement
E1.2 A driver controlled cruise control system:
Desired speed
Foot pedal (^) Actual auto speed
Visual indication of speed
Controller
Process
Measurement
Driver
Car and Engine
Speedometer
E1.3 Although the principle of conservation of momentum explains much of the process of fly-casting, there does not exist a comprehensive scientific explanation of how a fly-fisher uses the small backward and forward mo- tion of the fly rod to cast an almost weightless fly lure long distances (the
1
2 CHAPTER 1 Introduction to Control Systems
current world-record is 236 ft). The fly lure is attached to a short invisible leader about 15-ft long, which is in turn attached to a longer and thicker Dacron line. The objective is cast the fly lure to a distant spot with dead- eye accuracy so that the thicker part of the line touches the water first and then the fly gently settles on the water just as an insect might.
Desired position ofthe fly
Actual position of the fly
Visual indicationof the position of the fly
Fly-fisher
Wind Controller disturbance
Process
Measurement
Mind and body of the fly-fisher
Rod, line, and cast
Vision of the fly-fisher
E1.4 An autofocus camera control system:
One-way trip time for the beam
Distance to subject
Lens focusing motor
K (^1)
Lens
Conversion factor (speed of light orsound)
Emitter/ Receiver
Beam
Beam return Subject
4 CHAPTER 1 Introduction to Control Systems
E1.8 Human biofeedback control system:
Measurement
Desired body temp
Actual body temp
Visual indication of body temperature
Message toblood vessels
Controller Process
Body sensor
Hypothalumus (^) Human body
TV display
E1.9 E-enabled aircraft with ground-based flight path control:
Corrections to the flight path
Controller
Gc(s)
Aircraft Desired - G(s) Flight Path
Flight Path
Corrections to the flight path Controller
Gc(s) Aircraft
G(s)
Desired Flight Path
Flight Path
Ground-Based Computer Network
Health Parameters
Health Parameters
Meteorological data
Meteorological data
Optimal flight path
Optimal flight path
Location and speed
Location and speed
E1.10 Unmanned aerial vehicle used for crop monitoring in an autonomous mode:
-^ G c( s )^ G ( s )
Camera
Ground photo
Controller UAV Specified Flight Trajectory
Location with respect to the ground
Flight Trajectory
Map Correlation Algorithm
Trajectory error
Sensor
Exercises 5
E1.11 An inverted pendulum control system using an optical encoder to measure the angle of the pendulum and a motor producing a control torque:
Desired^ Error^ Angle angle
Measured angle
Process
Optical encoder
Measurement
Motor
Actuator Voltage Torque Controller
E1.12 In the video game, the player can serve as both the controller and the sen- sor. The objective of the game might be to drive a car along a prescribed path. The player controls the car trajectory using the joystick using the visual queues from the game displayed on the computer monitor.
Error (^) Game Desiredgameobjective - Video game objective
Process
Player (eyesight, tactile, etc.)
Measurement
Joystick
Actuator Player
Controller
Problems 7
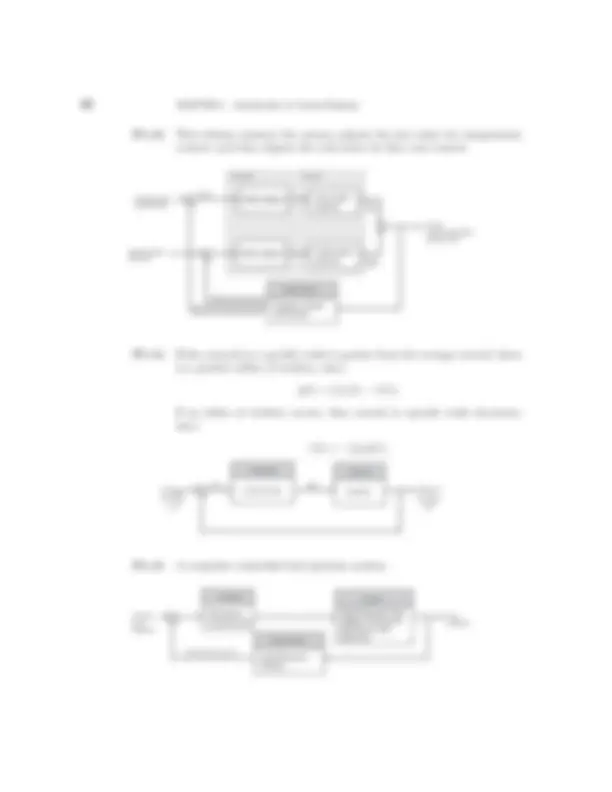
P1.4 A nuclear reactor control block diagram:
Desired power level Outputpower level
Error
Measured chemical composition
Process
Measurement
Controller
Ionization chamber
Reactor Motor and amplifier and rods
P1.5 A light seeking control system to track the sun:
Lighintensity
Desiredcarriage
Light position source Photocellcarriage position
Error Motorinputs
Controller Process Motor, carriage, and gears
K
Controller Trajectory Planner
Dual Photocells
Measurement
P1.6 If you assume that increasing worker’s wages results in increased prices, then by delaying or falsifying cost-of-living data you could reduce or elim- inate the pressure to increase worker’s wages, thus stabilizing prices. This would work only if there were no other factors forcing the cost-of-living up. Government price and wage economic guidelines would take the place of additional “controllers” in the block diagram, as shown in the block diagram.
Initial wages Prices
Wage increases
Market-based prices
Cost-of-living
Controller
Industry Governmentprice guidelines
Government K 1 wage guidelines
Controller
Process
8 CHAPTER 1 Introduction to Control Systems
P1.7 Assume that the cannon fires initially at exactly 5:00 p.m.. We have a positive feedback system. Denote by ∆t the time lost per day, and the net time error by ET. Then the follwoing relationships hold:
∆t = 4/3 min. + 3 min. = 13/3 min.
and
ET = 12 days × 13 /3 min./day.
Therefore, the net time error after 15 days is
ET = 52 min.
P1.8 The student-teacher learning process:
Desired knowledge
Error Lectures Knowledge
Measured knowledge
Controller Process
Teacher (^) Student
Measurement
Exams
P1.9 A human arm control system:
Visual indication of arm location
y z
u e d
s
Controller Process
Measurement
Desired arm location
Arm Nerve signals location
Eyes and pressure receptors
Brain Arm &muscles
Pressure
10 CHAPTER 1 Introduction to Control Systems
P1.13 This scheme assumes the person adjusts the hot water for temperature control, and then adjusts the cold water for flow rate control.
Desired watertemperature
Actual water temperature and flow rate
Coldwater
Desired waterflow rate
Measured water flow Measured water temperature
Error
Controller Process
Measurement Human: visual and touch
Valve adjust
Valve adjust Hot water system
Cold water system
Hotwater
P1.14 If the rewards in a specific trade is greater than the average reward, there is a positive influx of workers, since
q(t) = f 1 (c(t) − r(t)).
If an influx of workers occurs, then reward in specific trade decreases, since
c(t) = −f 2 (q(t)).
Error
Controller Process
f 1 ( c ( t )- r ( t ))^ q ( t )^ f 2 ( q ( t )) Total of rewards c ( t )
Average rewards r ( t )
P1.15 A computer controlled fuel injection system:
Desired FuelPressure
FuelPressure
Measured fuel pressure
Process
Measurement
Controller
Fuel Pressure Sensor
Electronic Control Unit
High Pressure Fuel Supply Pump and Electronic Fuel Injectors
Problems 11
P1.16 With the onset of a fever, the body thermostat is turned up. The body adjusts by shivering and less blood flows to the skin surface. Aspirin acts to lowers the thermal set-point in the brain.
Body temperature
Desired temperature or set-point from body thermostat in the brain
Measured body temperature
Process
Measurement
Controller
Internal sensor
Adjustmentswithin the Body body
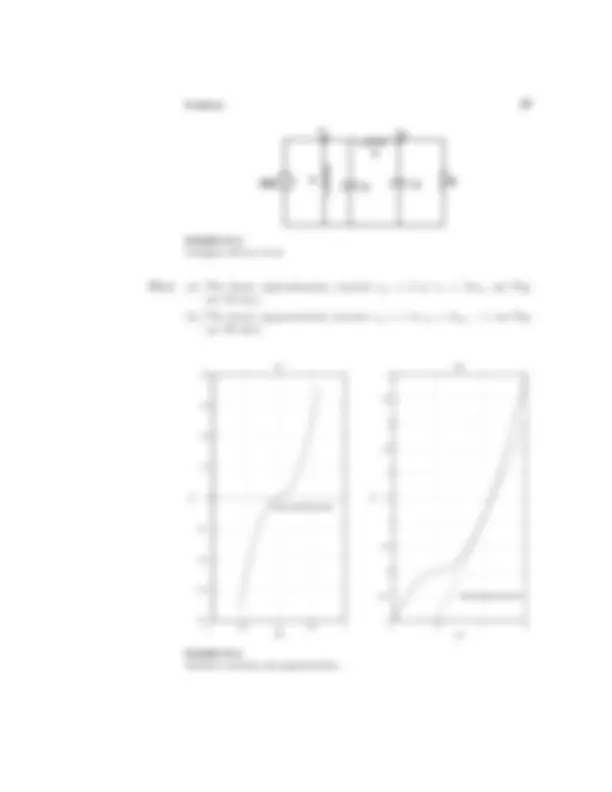
P1.17 Hitting a baseball is arguably one of the most difficult feats in all of sports. Given that pitchers may throw the ball at speeds of 90 mph (or higher!), batters have only about 0.1 second to make the decision to swing—with bat speeds aproaching 90 mph. The key to hitting a baseball a long dis- tance is to make contact with the ball with a high bat velocity. This is more important than the bat’s weight, which is usually around 33 ounces (compared to Ty Cobb’s bat which was 41 ounces!). Since the pitcher can throw a variety of pitches (fast ball, curve ball, slider, etc.), a batter must decide if the ball is going to enter the strike zone and if possible, decide the type of pitch. The batter uses his/her vision as the sensor in the feed- back loop. A high degree of eye-hand coordination is key to success—that is, an accurate feedback control system. P1.18 Define the following variables: p = output pressure, fs = spring force = Kx, fd = diaphragm force = Ap, and fv = valve force = fs - fd. The motion of the valve is described by ¨y = fv/m where m is the valve mass. The output pressure is proportional to the valve displacement, thus p = cy , where c is the constant of proportionality.
Screw displacement x ( t )
y
Valve position Output pressure p ( t )
f s
Diaphragm area
Valve c
Constant of proportionality
A
K
Spring
f v
f d
Problems 13
P1.22 The desired building deflection would not necessarily be zero. Rather it would be prescribed so that the building is allowed moderate movement up to a point, and then active control is applied if the movement is larger than some predetermined amount.
Desired deflection
Deflection
Measured deflection
Process
Measurement
Controller
K
Hydraulic Building stiffeners
Strain gauges on truss structure
P1.23 The human-like face of the robot might have micro-actuators placed at strategic points on the interior of the malleable facial structure. Coopera- tive control of the micro-actuators would then enable the robot to achieve various facial expressions.
Desired actuatorposition
Voltage (^) Actuator position
Measured position
Error
Process
Measurement
Controller
Amplifier
Position sensor
Electro- mechanical actuator
P1.24 We might envision a sensor embedded in a “gutter” at the base of the windshield which measures water levels—higher water levels corresponds to higher intensity rain. This information would be used to modulate the wiper blade speed.
Desired wiper speed
Wiperblade speed
Measured water level
Process
Measurement
Controller
K Water depthsensor
Wiper blade and motor
Electronic Control Unit
14 CHAPTER 1 Introduction to Control Systems
P1.25 A feedback control system for the space traffic control:
Desired orbit position
Actual orbit position
Measured orbit position
Jet commands
Applied forces
Error
Process
Measurement
Controller Actuator Controllaw Reactioncontrol jets Satellite
Radar or GPS
P1.26 Earth-based control of a microrover to point the camera:
Microrover Camera position command
Controller Gc(s)
Camera position command
Camera Position
Receiver/ Transmitter (^) positionRover
Camera
Measured camera position
G(s)
Measured camera position Sensor
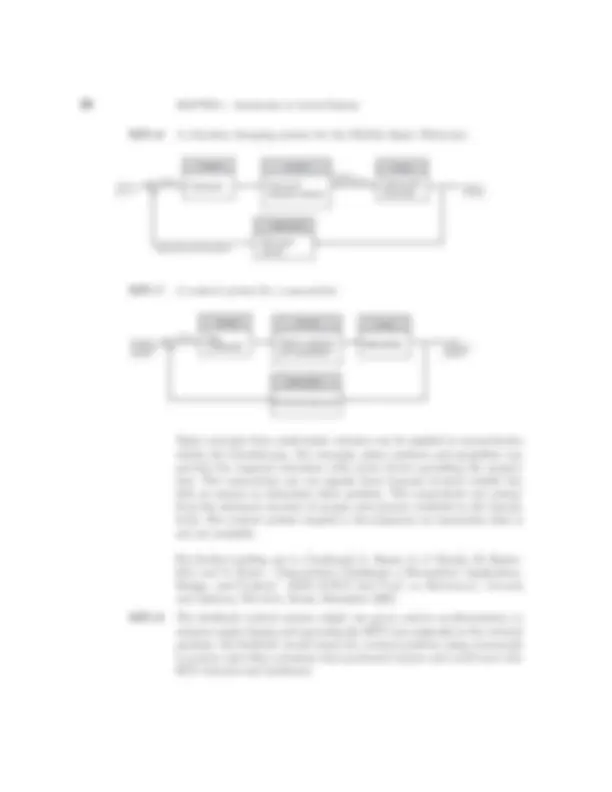
P1.27 Control of a methanol fuel cell:
Methanol water solution
Controller
Gc(s)
Recharging System GR(s)
Fuel Cell
Charge Level
Desired Charge Level
Measured charge level
Sensor H(s)
16 CHAPTER 1 Introduction to Control Systems
Even though the sensors may accurately measure the distance between the two parked vehicles, there will be a problem if the available space is not big enough to accommodate the parking car.
Error (^) Actual Desiredautomobileposition - Automobile automobileposition
Process
Ultrasound
Measurement
Steering wheel, accelerator, and brake
Actuators On-board computer
Controller
Position of automobile relative to parked cars and curb
AP1.4 There are various control methods that can be considered, including plac- ing the controller in the feedforward loop (as in Figure 1.3). The adaptive optics block diagram below shows the controller in the feedback loop, as an alternative control system architecture.
Uncompensatedimage Astronomicaltelescope Compensatedimage mirror
Process
Wavefront sensor
Measurement Wavefront corrector
Actuator & controller
Wavefront reconstructor
Astronomical object
AP1.5 The control system might have an inner loop for controlling the acceler- ation and an outer loop to reach the desired floor level precisely.
Desired Desiredacceleration^ Elevator^ Floor floor
Elevator motor, cables, etc.
Error Controller #2 (^) Controller #
Error
Acceleration Measured acceleration Measurement
Outer Loop
Inner Loop
Advanced Problems 17
AP1.6 An obstacle avoidance control system would keep the robotic vacuum cleaner from colliding with furniture but it would not necessarily put the vacuum cleaner on an optimal path to reach the entire floor. This would require another sensor to measure position in the room, a digital map of the room layout, and a control system in the outer loop.
Desired distance from obstacles
Distance from obstacles
Error
Infrared Measured distance from obstacle sensors
Controller
Process
Robotic vacuum cleaner
Motors, wheels, etc.