Download tws tracking moving target and more Study Guides, Projects, Research Robotics in PDF only on Docsity!
_____________________________________________________________________
Chapter 15.
Tracking Moving Targets
15.1.Track While Scan (TWS)
The track of a target in 2D can be determined from a surveillance radar Plan Position Indicator (PPI) display by plotting the target coordinates as they move when measured from scan to scan.
Figure 15.1: Examples of plan position indicator display hardware
At its most simple, this tracking function can be performed by a radar operator marking the face of the cathode ray tube with a pen. This is an inaccurate process and limits the number of targets that can be handled at one time.
Figure 15.2: Plan position indicator showing a simulated and a real display
_____________________________________________________________________
Automatic trackers operate as follows (for a single target)
- Target is detected as the received echo exceeds a threshold. There is no information about its velocity. The software constrains the uncertainty to a reasonable value for an aircraft target (large circle)
- Target is detected again displaced in range and angles, but within the uncertainty boundary. A crude velocity estimate is made and the position where the target will appear next is predicted. The uncertainty is still large as the position and velocity estimates are not good.
- The target appears within this uncertainty boundary. Tracking filters estimates of position and velocity improve, and the next sample prediction is made with a smaller position uncertainty
- As with (3)
- The actual target position falls outside the position uncertainty boundary because it has accelerated, and the prediction algorithm only used position and velocity. Track is lost
- A new target is detected with unknown velocity.
1 2 3
4 5 6
Figure 15.3: PPI Display sequence to illustrate the target tracking process
One method of performing the filtering and prediction function is to use αβ filters
(see Chapter 13) for the polar co-ordinates ( R ,θ). An alternative would be to convert
the measured positions from polar to Cartesian ( x , y ) before filtering as shown in the figure.
Figure 15.4: Track while scan processing
_____________________________________________________________________
15.2.1. Single Channel Detection
The block diagram of a single channel coherent radar is shown in the figure below.
The transmitter configuration is Master Oscillator Power Amplifier (MOPA)
- The transmitted signal is obtained by mixing an RF signal from a Stable Local Oscillator (STALO) with a frequency f (^) rf with a coherent oscillator (also very stable) with a frequency f (^) if.
- The resulting frequency (after filtering) id f (^) o is pulse modulated to form a pulse train, amplified and transmitted.
The received signal is down converted to IF (typically 30-60MHz) by mixing with the STALO signal. After amplification and filtering it is down converted further to baseband (video) by mixing with the COHO signal
A consequence of this single channel down conversion is that there is no direction information in any Doppler modulation since a target receding would produce exactly the same Doppler signature as one approaching and the response is
V 1 = k sin ( 2 π f (^) d t + φ o ), (18.1)
where V 1 – Video output voltage, k – Amplitude of the video signal, f (^) d – Doppler frequency (Hz),
φ o –Phase shift (rad).
Figure 15.7: Single channel coherent pulsed Doppler radar
_____________________________________________________________________
15.2.2. I/Q Detection
In an I/Q detector, the IF signal is split into two channels with the quadrature (Q) channel being phase shifted by 90° with respect to the in-phase (I) channel
Though the two Doppler signals output by the I and Q channels will have identical frequency whether the target is approaching or receding, their phase relationship with each other will reverse, and so direction information can be obtained as discussed in Chapter 13.
Figure 15.8: Coherent pulsed radar with a synchronous (i/q) detector
By sampling the I and Q outputs and using a complex fast Fourier Transform (FFT), the magnitude and phase of the combined Doppler spectrum can be obtained.
Another benefit of I/Q detection over single channel detection is that a 3dB gain in SNR is obtained at the output of the Doppler spectral analysis function.
If the actual Doppler frequency is not important, but only the fact that the target is moving at important, then a process called Moving Target Indication (MTI) can be applied.
15.2.3. Moving Target Indicator (MTI)
For a moving target. if the video output of the I or Q channel is examined, the amplitude will vary on a pulse to pulse basis, as shown earlier, due to the changing phase between the transmitted and received signals. For a static target, the phase will remain unchanged, and the amplitude will remain constant.
An MTI based on a delay-line canceller operates by taking the difference of the amplitudes of successive pulses as shown below.
_____________________________________________________________________
Blind Speeds
If the target Doppler frequency lies in the region where f (^) d ≈ 1/ T , it can be seen, from the transfer function above, that it is attenuated. Zeros also occur at 2/ T , 3/ T … n / T
d nf p T
n f = = , (18.2)
where f (^) d – Doppler frequency (Hz), f (^) p – Pulse repetition frequency (PRF) (Hz).
The actual blind speeds are given by the following
p n
n f T
n v
= = m/s, (18.3)
where v (^) n – Blind speed (m/s),
λ - Transmitter wavelength (m),
n – 1,2,3,…
To obtain a high first blind speed, it is necessary to either operate with a long wavelength (often not practical), or to operate with a high PRF. However, a high PRF becomes ambiguous at a short range which is also not ideal for surveillance or long range tracking radar applications.
Staggered PRF and Blind Speed
The effect of blind speeds can be reduced by operating at more than one PRF as shown below.
Figure 15.12: Effect of staggered PRF on MTI transfer function
_____________________________________________________________________
As the ratio of the pulse repetition interval, PRI, T 1 / T 2 approaches unity, the greater will be the value of the first blind speed. However, the first null also gets deeper and so the rejection of slowly moving clutter will be compromised.
To cater for the moving clutter problem, a bank of Doppler filters can be implemented instead of a delay line canceller. In modern radars, this process is generally implemented digitally using the Complex FFT. The outputs (excluding sidelobes) of such a filter implementation are shown below.
To obtain sufficient rejection of unwanted signals in adjacent bins, the filter sidelobes must be made as low as possible.
AmplitudeResponse (^0 1 2 3 4 5 6 7 8 9 10 11 12) Frequency Bin
Figure 15.13: Filter bank implemented using the FFT
A tradeoff exists between the width of the mainlobe and the sidelobe level with different windowing (weighting) functions as discussed in Chapter 11.
Table 15.1: Properties of weighting functions
Weighting Function Peak Sidelobe Level (dB)
MainLobe Width Rectangular -13.26 0. Hanning -31.5 1. Hamming -42.5 1. Taylor n=5 -34 1. Taylor n=6 -40 1. Dolph Chebyshev -40 1.
15.3.Limitations to MTI Performance
Sub-clutter visibility is the ratio by which the moving-target power may be lower than the clutter in the same range bin, and still be detected with a specified Pd and Pfa.
It is usually limited by internal instabilities in the amplitude and phase of the various waveforms generated by the radar, by the motion of a scanning antenna and the finite time on target which has the effect of widening the clutter spectrum and also by the bandwidth characteristics of real clutter. Rain is blown by the wind, the sea moves, as do leaves and grass.
15.4.Range Gated Pulsed Doppler Tracking
The Doppler tracking loop and the range tracking loop are interrelated. The Doppler tracking loop operates on video sampled at the range indicated by the range tracker while range tracking is usually accomplished by means of the split (early/late) gate technique.
_____________________________________________________________________
- The video signals in bot the azimuth and elevation monopulse angle error channels are sampled by a range gate slaved to the target gate of the range tracker.
- The sampled video for each of the two error signals is filtered by a Doppler filter slaved to the frequency of the Doppler tracker. Thus angle errors are derived only from the same range-Doppler cell that contains the target.
- After a brief period to allow the range tracking loop to settle, the angle tracking loop is closed.
The transition from search to track is not a trivial problem, and it is made even more difficult in the military scenario, if the target either starts to manoeuvre or tries to disrupt the process by deploying chaff or by some electronic means
15.5.Co-ordinate Frames
15.5.1. Measurement Frame
Radar measurements are made in polar space (R,θ,φ) as the radar can only measure range, elevation and bearing (azimuth).
15.5.2. Tracking and Estimation Frame
The equations of motion that govern the profile of a target operate in Cartesian space, (x,y,z), so it is advantageous to transform the co-ordinate system from polar to Cartesian space.
Figure 15.15: Rectangular <–> Polar (spherical) transfer function
Generally this frame of reference will remain centred at the radar, however, some fire control systems translate and rotate the frame to make it target centred as the aircraft dynamics can be better modelled in this frame.
If more than one sensor may be involved in the tracking function, and these sensors are not co-located (they may be on different platforms that move relative to each other), then an earth centred Cartesian frame is generally used.
_____________________________________________________________________
15.6.Antenna Mounts and Servo Systems
Figure 15.16: Antenna mounts
The pencil beam of a tracking radar must be pointed at the target for tracking to occur. This is quite a challenge as a typical tracking radar has a 3dB beamwidth between 1° and 2°, or smaller in the case of the radar for a close-in weapon system onboard ship.
A servo system is used to drive the antenna in the direction that minimises the tracking errors. Most servo systems are Type II, or zero velocity error systems since, in theory, no steady-state error exists for a constant velocity (angular rate) input. With Type II systems, dynamic lags proportional to the magnitude of the target acceleration do occur. To accommodate this, the tracking bandwidth is adjusted to minimise the tracking error which is due to a combination of measurement noise and dynamic lag.
_____________________________________________________________________
The pointing system, generally known as a pedestal must be able to accommodate both target motion as discussed and its own base motion (if mounted on a moving vehicle)
There are many different types of antenna mounts that can be used depending on the tracking and stabilisation requirements.
15.6.1. On-Axis Tracking
The best tracking occurs using null-steering when the antenna is pointed towards the target with an accuracy of only a few milliradians. This is known as on-axis tracking.
It reduces cross coupling between the axes by minimising cross polar levels and reducing the effects of system nonlinearities.
It requires the following:
- the removal by prior calibration of biases
- a filter than can perform one sample ahead prediction
- the selection of the appropriate co-ordinate system for tracking.
Target dynamics that dictate the real and apparent acceleration and tracking loop bandwidth determines the tracking accuracy.
15.6.2. Crossing Targets and Apparent Acceleration
Figure 15.19: Geometry of a crossing target (a) in plan and (b) in perspective
_____________________________________________________________________
When viewed in radar polar co-ordinates, the target velocities will be
R
v E R
v R &^ (^) max = vt , A &max= t ,&max= t. (18.4)
The real accelerations are
R
a E R
a R &&^ (^) max = at , A &&max= t ,&&max= t. (18.5)
The geometric accelerations and other derivatives are shown below. They are
normalised in the angular co-ordinates to A &max^ =ϖ m = vt / Rc. Where Rc is the ground
range at crossover.
Figure 15.20: Angular derivatives for crossing targets
In range, the derivatives are normalised to Ra = Rmin , at the point of closest approach.
_____________________________________________________________________
If thermal noise and dynamic lag are the primary sources of error, then an optimum bandwidth can be obtained to minimise the total error variance. According to Barton, this is
2 2
2 2
2 2 3 ( / ) 6. (^3) n
t m r
n R B
a k f B S N
B
1 / 5 2 2 3
2 2
- 6
R
a k f B S N B (^) n t m r θ
τ , (18.10)
where: at – acceleration (real or geometric) (m/s 2 ), k (^) m – Monopulse Gain Constant (typ 1.6), f (^) r – Pulse repetition frequency (Hz),
B τ - IF bandwidth and pulse width (see matched filter),
S/N – Single pulse signal to noise ratio,
θ 3 – Antenna beamwidth (rad),
R – Crossing Range (m).
Figure 15.22: Typical noise and lag optimisation
15.6.3. Tracking in Cartesian Space
One method of maintaining the noise performance of the system while minimising the dynamic lag is to operate with a wide angle-servo bandwidth, and to perform the tracking and smoothing in Cartesian space.
As there are no geometric accelerations in Cartesian space, it is possible to reduce the filter bandwidth to less than 1Hz. This determines the noise performance of the tracker.
_____________________________________________________________________
Because the angle servo bandwidth is wide (typically 10 to 100Hz for a real system), the dynamic lag for geometric accelerations is limited.
A simplified block diagram showing the loop configuration is shown below.
Radar
Polar to Cartesian
Tracking Filter Bank
Cartesian to Polar
Encoders
Angle Servos
x y z
x y z
R
dEl
dAz Az El
El Meas Az Meas El Command
Az Command
Figure 15.23: Tracking in Cartesian space
_____________________________________________________________________
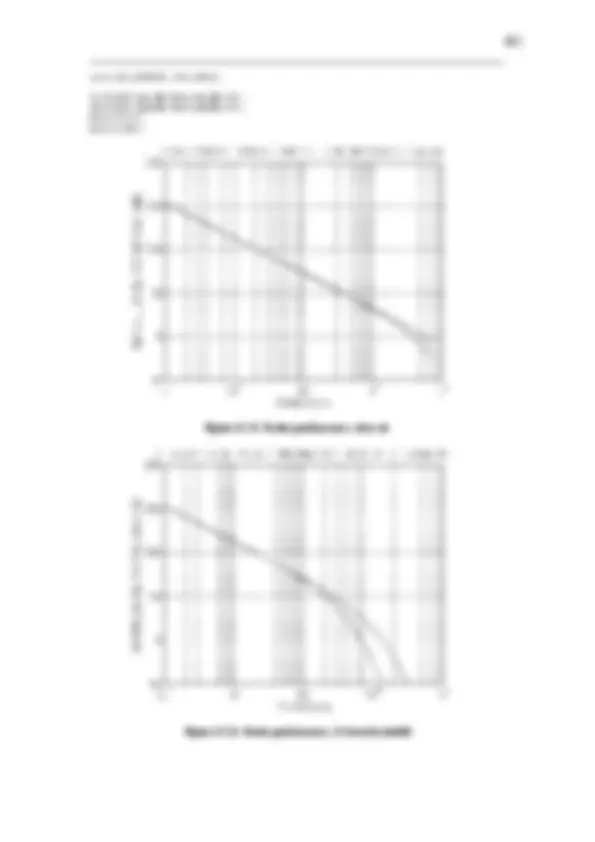
15.7.2. Selection of Polarisation
For low flying aircraft over the sea we want to minimise the sea clutter. In calm seas at low grazing angles the difference between the reflectivity for horizontal polarisation and vertical polarisation exceeds 12dB. As the roughness increases the difference decreases.
Figure 15.24: Sea Clutter reflectivity as a function of grazing angle
The radar will operate using horizontal polarisation, and it will be assumed that the
surface reflectivity σ° is –35dB.
15.7.3. Pedestal Specifications
The maximum combined roll and pitch angle is
2 2
ϕ max < 25 + 5.
This does not exceed 30°
_____________________________________________________________________
The antenna can be stabilised with respect to this tilt adequately without resorting to a 3 rd^ axis, however, it can result in a significant rotation of the polarisation
The pedestal will be of the type elevation, θ, over
azimuth, φ.
θ defined as +ve up from the horizontal
φ defined as +ve anticlockwise from the x-axis
For a mounting height ≈ 8m above the sea with the minimum tracking angle for a sea
skimmer at R = 50m ( θ = -6°) and a combined roll and pitch angle of 30° requires a
minimum angle of -36° ( θ min = -40°).
To allow the antenna to track over the vertical, and to have time to slew around in azimuth without losing lock at the maximum combined roll and pitch angle requires
φ max = 90+30 = 120° (use 125°)
15.7.4. Radar Horizon
For hr = 8m and ht = 60m, the radar horizon is given by
d = 130 ( hr ( km )+ ht ( km )= 43 km
The radar horizon is not a consideration for this design
15.7.5. Selection of Frequency
A reasonable maximum diameter for the antenna on a shipboard radar is 1.5m.
The beamwidth at various frequencies will be as follows:
Table 15.3: Beamwidth for different frequencies
Frequency (GHz)
Band Beamwidth (deg) 10 X 1. 35 Ka 0. 94 W 0.
A narrow beam decreases the effect of multipath and limits the area of clutter within the tracking gate, while attenuation increases with frequency (particularly in the rain)
The minimum elevation angle when tracking at target at h = 60m and R = 15km
θ = 0.19° and the minimum tracking angle when tracking a sea skimmer at h = 3m
and R = 50m θ = -6°
Though it may be possible to minimise the effects of multipath, it is not possible to eliminate them when the radar is looking down at the target.