Download Faculty Notes for Space Vehicle Hold Down and Release Mechanism Design and more Study notes Cultural History of Europe in PDF only on Docsity!
FACULTY NOTES
The LTAs and Spinoffs are designed so that each professor can implement them in a way that is consistent with his/her teaching style and course objectives. This may range from using the materials as out-of-class projects with minimal in-class guidance to doing most of the work in class. The LTAs and Spinoffs are amenable to small group cooperative work and typically benefit from the use of some learning technology. Since the objective of the LTAs and Spinoffs is to support the specific academic goals you have set for your students, the Faculty Notes are not intended to be prescriptive. The purpose of the Faculty Notes is to provide information that assists you to take full advantage of the LTAs and Spinoffs. This includes suggestions for instruction as well as answers for the exercises.
NASA - AMATYC - NSF
FACULTY NOTES
LTA 14
Space Vehicle Hold Down and Release Mechanism Design
General Remarks:
Typical story problems in mathematics require students to formulate an equation to model a situation. This LTA requires students to develop a qualitative graph to model the physical situation and to interpret graphs representing a physical event.
Section I
Restraining Force vs. Displacement Graphs
Hand out the first few pages of LTA 14 ( Space Vehicle Hold Down and Release Mechanism Design) through Section I. This will provide the students with a general description of what a soft- release hold down system should do.
Students should work in groups of 2 - 4 for approximately 20 minutes to determine from the information handed out what the graph of Force vs. Displacement should look like. Then, have the groups critique each other’s graph to see if the graphs satisfy the description of a soft release mechanism. Results should be a decreasing function in the first quadrant which ends on or near the x-axis, where x is displacement. As an example, see the restraining force graph in Figure 3, Section II.
It is sufficient to accept oral discussion for the explanations of Sectiont I - a written explanation is not required. If a written report is desired, students tend to need a good deal of direction as to the structure of the report. Since Section I is to be used to elicit student ideas and stimulate discussion, a written report is not recommended.
Section II
Characteristics of a Restraining Force vs. Displacement Graphs
Hand out the rest of the LTA. The graph of the CRM restraining force in Figure 3 has several important features. a) The force starts out high and decreases to either a zero or to a small positive value. When the launch vehicle is released, any net upward force imparts a “kick” to the launch vehicle. Such an impulse or kick must be kept small. b) A near zero slope at beginning and end makes the change in the restraining force in those regions very small and leads to a smoother liftoff. However, not all soft release mechanisms have small initial and ending slopes. The graph of the CRM restraining force shown in Figure 3 is based on the release mechanism for the Saturn V used during the Apollo program.
NASA - AMATYC - NSF
- Mechanism C: a) Characteristics exhibited:
- Low restraining force at release
- No sharp corners on graph
- Energy absorbed by the CRM is within the acceptable range: 125,000 - 250,000 in-lb. Characteristics lacking:
- Flat or nearly flat graph at initial and final displacements
- Decreasing graph throughout displacement interval
b) Energy Absorbed is approximately 227,000 in-lb. (The result is obtained by doubling the area for the left half of the region. The area for the left half is based on 7 trapezoids and one triangle.)
General comments: Mechanism C is a bad design since the Force vs. Displacement curve is increasing during a part of the displacement. The curve is smooth but is not flat at both ends. One good feature is that the force at release is near zero. The initial restraining force is zero leading to a big jerk at the beginning. The CRM represented by this curve would be good if it were preloaded to about 3.5 in of displacement.
- Mechanism D: a) Characteristics exhibited:
- Decreasing graph throughout displacement interval
- Low restraining force at release
- No sharp corners on graph
- Energy absorbed by the CRM is within the acceptable range: 125,000 - 250,000 in-lb. Characteristics lacking:
- Flat or nearly flat graph at initial and final displacements
b) Energy Absorbed by the CRM is approximately 248,000 in-lb. (The result is based on 7 trapezoids.)
General comments: Mechanism D is a good design. The Force vs. Displacement curve is decreasing, smooth, and flat at the beginning. The curve is not flat at release, but the force at release is near zero. It would be better if the curve flattened a bit more at the end.
- Mechanism E : a) Characteristics exhibited:
- Decreasing graph throughout displacement interval
- Low restraining force at release
- No sharp corners on graph
- Energy absorbed by the CRM is within the acceptable range: 125,000 - 250,000 in-lb. Characteristics lacking:
- Flat or nearly flat graph at initial and final displacements.
NASA - AMATYC - NSF
b) Energy Absorbed by the CRM is approximately 175,000 in-lb. (The result is based on one triangle with height = 50,000 lbs and base = 7 inches.) General comments: If the curve for Mechanism E were flattened at the ends, it would be a good force vs. displacement profile for a CRM.
The following table summarizes the answers for Exercises 2 - 6.
Summary table for Exercises 2 - 6
Characteristics
Ex 2 Mech A
Ex 3 Mech B
Ex 4 Mech C
Ex 5 Mech D
Ex 6 Mech E Flat or nearly flat at both ends L E L L L Decreasing on entire interval L E L E E Low force at release L E E E E No sharp corners E E E E E Energy absorption within range Energy absorbed (in-lbs.)
E
L
E
E
E
E = Exhibits characteristic, L = Lacks characteristic
The only candidates for good CRM Mechanisms are B, D, and E because they are the only ones with a decreasing restraining force throughout the entire displacement. However, each of these could be improved. Mechanism B would be better if it absorbed more energy to bring it within the acceptable range, 125,000-250,000 in-lb. Mechanism E would be better if its graph were flattened at the beginning and end of the displacement. Mechansim D would be better if its graph were flattened at the end of the displacement.
In order from least to most energy absorbed, we have Mechanisms B, A or E, C, D.
Mechanism B would be the best one if it absorbed enough more energy to bring it within the Acceptable range, 125,000 - 250,000 in-lb, while its graph retained the same general shape. On the other hand, Mechanisms D and E would be very good if their graphs were flattened at both ends.
Section III
Controlled Release Mechanism for the Evolved Expendable launch Vehicle
- a) Graph 1: Tensile Bar Mechanism b) The description of the Tensile Bar Mechanism indicates that pre-loading is required. Because Graph 1 increases for the first part of its displacement, it represents a CRM that must be pre- loaded to the length at which the restraining force is largest. That is, the graph represents a retraining force that must be pre-loaded to the top of the curve where it is relatively flat. A second reason for making this selection is that the description of the Tensile Bar Mechanism
NASA - AMATYC - NSF
50% is 7 inches. 47% elongation is 6.58 inches, and the corresponding restraining force is 863 lbs from the TI-83/85/86 and 619 lbs from Excel order 6.
53% elongation is 7.42 inches, and the corresponding restraining force is - 1003 lbs on the TI- 83/85/86 and 723 lbs for the Excel degree 6. Each of these don’t make much sense. The result from TI-83/85/86 implies that the restraining force is pushing the rocket off the pad instead of restraining it. The result from Excel implies that the restraining force for a displacement of 7. inches is larger than the restraining force for a displacement of 6.58 inches. That is, according to the Excel polynomial, the restraining force would increase as the displacement increased beyond 7 inches. This situation points out the problem with polynomial extrapolations. The graphs of the polynomials of order 4 and order 6 are shown below in Figures 1 and 2 respectively.
Figure 1: graph of polynomial of order 4
0
1 0 0 0 0
2 0 0 0 0
3 0 0 0 0
4 0 0 0 0
5 0 0 0 0
6 0 0 0 0
0 1 2 3 4 5 6 7 8
D i s p l a c e m e n t ( i n )
Force (lb)
NASA - AMATYC - NSF
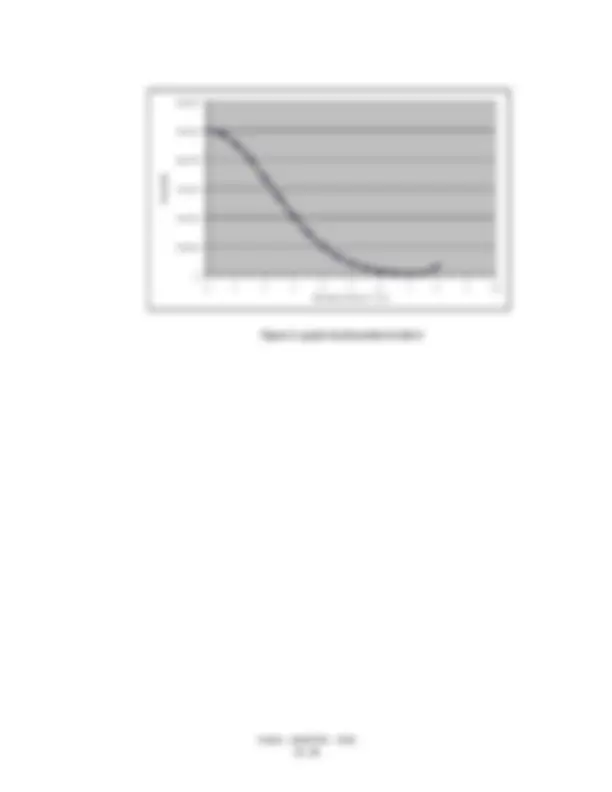
Figure 2: graph of polynomial of order 6
0
1 0 0 0 0
2 0 0 0 0
3 0 0 0 0
4 0 0 0 0
5 0 0 0 0
6 0 0 0 0
0 1 2 3 4 5 6 7 8 9 1 0 D i s p l a c e m e n t ( i n )
Force (lb)