¡Descarga Control ii apuntes unidad 2 y más Apuntes en PDF de Sistemas de Control solo en Docsity!
UNIDAD 2.- Compensación
2.1. Introducción a la compensación de sistemas automáticos de control.
2.2. Compensadores en adelanto de fase usando el método de lugar
geométrico de las raíces.
2.3. Compensadores en adelanto de fase usando el método de respuesta a
la frecuencia.
2.4. Compensadores en atraso de fase usando el método de lugar
geométrico de las raíces.
2.5. Compensadores en atraso de fase usando el método de respuesta a la
frecuencia.
2.6. Compensadores en atraso - adelanto usando el método de lugar
geométrico de las raíces.
2.7. Compensadores en atraso - adelanto usando el método de respuesta a
la frecuencia.
Introducción:
Compensación es la modificación de la dinámica del sistema para satisfacer las
especificaciones requeridas.
Uno de los principales aspectos que deben ser tomados en cuenta para lograr un
funcionamiento satisfactorio en un sistema es el ajuste de ganancia; aunque en
casos prácticos muchas veces esto no es suficiente para cumplir con los requisitos o
especificaciones que se dan al diseñador del sistema.
El realizar un ajuste de ganancia puede traer contradicciones como ofrecer una
estabilidad pobre o en otros casos hasta inestabilidad, aun cuando la ganancia nos
esté ofreciendo una mejora en el funcionamiento estacionario del sistema. Debido a
esto es necesario diseñar la estructura introduciendo elementos (componentes)
adicionales, de tal manera que se altere el funcionamiento general hasta obtener el
comportamiento que se desea, a esto se le puede denominar COMPENSACION y al
dispositivo que se introduce en el sistema para satisfacer las especificaciones se le
denomina compensador y compensa las deficiencias del funcionamiento del sistema
original.
Se proyectan los sistemas de control para cumplir con determinadas tareas.
Generalmente a las condiciones requeridas en un sistema de control, se las
denomina especificaciones de funcionamiento. Habitualmente se refieren a
exactitud, estabilidad relativa y velocidad de respuesta.
Para problemas de diseño de rutina se pueden dar las especificaciones de
funcionamiento en términos de valores numéricos precisos. En otros casos pueden
ser dadas parcialmente en términos numéricos precisos y parcialmente en forma de
indicaciones cualitativas. En este último caso, pueden tenerse que modificar las
especificaciones durante el curso del proyecto, ya que las especificaciones dadas
pueden no ser satisfechas o llevar a un sistema muy costoso.
En términos generales, las especificaciones de funcionamiento no deben ser más
restringidas que las necesarias para cumplir determinada tarea. Si en un
determinado sistema de control, es de primordial importancia la exactitud de
funcionamiento en estado estacionario, no se deben requerir innecesariamente
rígidas especificaciones de funcionamiento en la respuesta transitoria, pues esas
especificaciones llevan a componentes costosos.
Un controlador automático compara el valor real de la salida de una planta con la
entrada de referencia (valor deseado), determina el error y produce una señal de
control que reducirá el error a cero o a un valor muy pequeño.
A la forma como el controlador automático produce la señal de control, se le
denomina acción de control.
Acciones básicas de control:
Los controladores analógicos se clasifican de acuerdo a sus acciones de control:
1) Controladores de dos posiciones o intermitentes (encendido o apagado)
2) Controladores proporcionales. (P)
3) Controladores integrales. (I)
4) Controladores proporcional-integral. (PI)
5) Controlador tipo proporcional – derivativo. (PD)
6) Controlador tipo proporcional – integral – derivativo (PID).
2 .1 Modos de control: on-off, on-off con brecha diferencial.
Es un sistema de control de dos posiciones, el actuador tiene solo dos posiciones
fijas, figura 2 .2 a), que en muchos casos son, simplemente conectado y
desconectado. El controlador de dos posiciones, o de encendido-apagado es
relativamente simple y económico, y por esta razón se usa ampliamente en
sistemas de control, tanto industriales como domésticos.
Sea u(t) la señal de salida del controlador, y e(t) la señal de error. - En un
controlador de dos posiciones, la señal u(t) permanece en un valor máximo o
mínimo, según sea la señal de error positiva o negativa, de manera que:
1
2
Donde U 1
y U 2
son constantes. Generalmente el valor mínimo de U 2
puede ser un
valor constante, o bien cero, o - U 1
En general los controladores de dos posiciones son dispositivos eléctricos, donde
habitualmente hay una válvula accionada por un solenoide eléctrico.
Los controladores neumáticos proporcionales con muy altas ganancias también
actúan como controladores de dos posiciones y se les conoce como controladores
neumáticos de dos posiciones.
El rango en el que la señal de error debe variar antes que se produzca la
conmutación, se denomina brecha diferencial o banda muerta.
La banda muerta provoca que la salida del controlador u(t), conserve su valor
presente hasta que la señal de error se haya desplazado ligeramente más allá de
cero.
La banda muerta en el control encendido/apagado, se usa con frecuencia para
evitar una operación demasiado frecuente del mecanismo de encendido/apagado.
Para una acción encendido/apagado con banda muerta, la relación entre la salida
del controlador u(t) y la señal de error e(t) es:
𝟏
Donde B es la brecha diferencial.
La magnitud de la banda muerta debe determinarse a partir de consideraciones
tales como la precisión requerida y la vida del componente, ya que la reducción de
la banda diferencial aumenta la conmutación de encendido y apagado por minuto y
reduce la vida útil del componente.
En la figura 2 .2 b) de la derecha se indica un controlador de encendido/apagado con
brecha diferencial y esta hace que la salida del controlador u(t) mantenga su valor
hasta que la señal de error haya rebasado ligeramente el valor de cero.
Figura 2.2.- a) Control ON-OFF, b) Control ON-OFF con brecha diferencial
En algunos casos, la brecha diferencial es el resultado de alguna fricción no
intencional o movimiento perdido, sin embargo, a veces se provoca en forma
deliberada para impedir la acción excesivamente frecuente del actuador y elemento
final de control.
El método de diseño a usar puede ser determinado por las especificaciones de
funcionamiento aplicables al caso particular. Al diseñar sistemas de control, si se
dan las especificaciones de funcionamiento en términos de la medición de
resultados en el dominio del tiempo, como el tiempo de crecimiento, máximo
sobreimpulso, o tiempo de establecimiento; o mediciones de resultado en el dominio
de la frecuencia como margen de fase, margen de ganancia, valor pico de
resonancia o ancho de banda, no hay otra elección que el método de tanteo y
modificación basado en los métodos del lugar de las raíces y/o métodos de
respuesta de frecuencia.
Figura 2.3.- Compensador serie.
Una alternativa a la compensación serie es realimentar la señal de algún elemento y
colocar un compensador en el bucle interno de realimentación resultante, como se
ve en la figura 2 .4. Esta compensación se denomina compensador de
realimentación o compensador paralelo.
Figura 2.4.- Compensador paralelo.
Al compensar sistemas de control se ve que el problema generalmente se concentra
en el diseño adecuado de la compensación serie o paralelo. La elección entre
compensación serie ó paralelo depende de la naturaleza de las señales en el
sistema, de los niveles de potencia en los distintos puntos, de los componentes
disponibles, de la experiencia del proyectista, de consideraciones económicas, etc.
En general, la compensación serie puede ser más simple que la compensación
paralela; sin embargo, la compensación serie frecuentemente requiere
amplificadores adicionales para aumentar la ganancia y/o para brindar aislamiento.
Entre los muchos compensadores del tipo de compensación serie empleado están
los denominados compensadores de adelanto, compensadores de atraso,
compensadores de atraso-adelanto. Generalmente son eléctricos, mecánicos,
neumáticos, hidráulicos o combinaciones de los mismos.
En el diseño del sistema de control, usar o no un compensador eléctrico, mecánico,
neumático o hidráulico, es cuestión que debe ser decidida parcialmente por la
naturaleza de la planta a controlar.
En el procedimiento de diseño de sistema por tanteo y ajuste, se establece un
modelo matemático del sistema de control y se ajustan los parámetros de un
compensador. La parte más lenta de este trabajo es la verificación de las
especificaciones de funcionamiento, analizando cada ajuste de los parámetros y el
proyectista debe usar una computadora analógica o digital para evitar una gran
parte de la excesiva tarea numérica necesaria en especificación.
Una vez obtenido un modelo matemático satisfactorio, el proyectista debe construir
un prototipo y probar el sistema de lazo abierto. Si se asegura la estabilidad
absoluta el proyectista cierra el lazo y verifica el funcionamiento del sistema
resultante de lazo cerrado. Debido a los efectos de carga despreciados entre los
componentes como alinealidades, parámetros distribuidos, etc., que no han sido
tenidos en cuenta en el trabajo de diseño original, el funcionamiento efectivo del
sistema prototipo probablemente ha de diferir de las predicciones teóricas. Así el
primer diseño puede no satisfacer todos los requerimientos de funcionamiento. Por
tanteo y modificación, el proyectista debe efectuar cambios en el prototipo hasta que
el sistema cumpla las especificaciones. Al hacerlo, debe analizar cada prueba e
incorporar los resultados del análisis en el próximo paso de tanteo. El diseñador
debe ver que el sistema final cumpla con las especificaciones de funcionamiento y al
mismo tiempo sea seguro y económico.
Es importante notar que en el diseño vía método de tanteo y ajuste o en proyecto
por medio del análisis, las especificaciones dadas no llevan a un sistema único. De
hecho, muchos sistemas pueden satisfacer las especificaciones dadas. Se puede
realizar una selección óptima entre las muchas posibilidades haciendo
consideraciones como comportamiento global proyectado, costo, espacio y peso.
Los métodos del lugar geométrico de las raíces y de respuesta de frecuencia para
proyectar un compensador, consisten esencialmente en ajuste de ganancia y diseño
de los compensadores, son bastante útiles, pero están limitados a sistemas de
controles relativamente simples e idealizados, como los lineales de una sola entrada
adición de polos y ceros en el lugar de las raíces se pueden determinar fácilmente
las posiciones de los polos y ceros del compensador que modificarán en la forma
deseada el lugar de las raíces.
La compensación de adelanto esencialmente brinda un mejoramiento apreciable
en la respuesta transitoria y una mejora pequeña en la exactitud de régimen
estacionario. Por otro lado, la compensación de atraso o retardo, produce una
apreciable mejora en la exactitud de régimen estacionario a expensas de
incrementar el tiempo de la respuesta transitoria. La compensación adelanto-atraso
combina las características de ambas formas de compensación. El uso de un
compensador adelanto o atraso incrementa en uno el orden del sistema. El uso de
un compensador adelanto-atraso incrementa el orden del sistema en dos, lo que
significa que el sistema se hace más complejo y es más difícil controlar el
comportamiento de la respuesta transitoria. La situación particular determina el tipo
de compensación a utilizar.
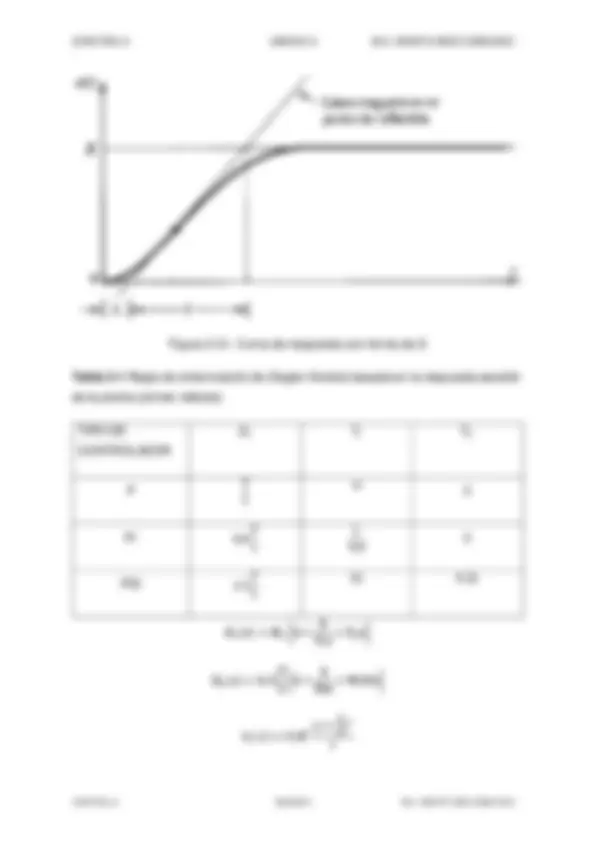
Figura 2. 2 .- a) ejemplo de curva de respuesta en frecuencia de lazo abierto
deseables e indeseables b) ejemplo de curva de respuesta en frecuencia de lazo
cerrado deseables e indeseables.
En la siguiente figura 2 .6, se puede ver el cambio de curva de respuesta en
frecuencia de lazo abierto si la región de alta frecuencia del lugar, sigue al lugar de
G
1
(jw). Mienta que la región de baja frecuencia del lugar sigue al lugar de G 2
(jw). La
curva modificada debe tener márgenes de fase y ganancia razonables o debe ser
tangente al círculo M adecuado como se muestra.
Figura 2. 6 .- Modificación de la curva de respuesta en lazo abierto.
COMPENSACION EN ADELANTO
Primero se ha de deducir las funciones trasferencias de una red eléctrica de
adelanto y una red mecánica de adelanto. Luego se han de presentar los
procedimientos para proyectar compensadores de adelanto basado en los
mecanismos del lugar de las raíces y la respuesta en frecuencia.
Redes de adelanto: En la figura 2.7, hay un diagrama esquemático de una red
eléctrica y una red mecánica de adelanto. El nombre red de adelanto proviene del
hecho que para una entrada sinusoidal 𝑒 𝑖
(𝑡), la salida de la red 𝑒
𝑜
(𝑡)es también
senoidal con adelanto de fase. El ángulo de adelanto de fase es función de la
frecuencia de entrada. Se ha de deducir la función de transferencia pera esta red.
Cuando es habitual al deducir la función transferencia de cualquier red de cuatro
terminales, se supone que la impedancia de la fuente conectada al cuadripolo es
cero y la impedancia de la carga de salida es infinita.
K
c
es la ganancia de c.d.
Para la red mecánica de adelanto de la figura 2 .7 b).
Del diagrama se obtienen las siguientes ecuaciones:
2
𝑖
0
1
0 −
1
0
Tomando las transformadas de laplace de las ecuaciones anteriores, suponiendo
condiciones iniciales cero.
0
𝑖
2
1
2
1
2
1
2
1
Esta es la función de transferencia entre X 0
(s) y X i
(s). Definiendo
1
2
1
2
Se obtiene:
𝑜
𝑖
𝑐
𝑐
Igual que en el caso eléctrico RC discutido anteriormente, si esta red mecánica se
utiliza como compensador en adelanto, es necesario agregar un dispositivo con
ganancia K c
ajustable, de modo que la función de transferencia del compensador
es:
𝐶
𝑐
Una red en adelanto tiene la siguiente función de transferencia:
𝑐
Tiene un zero en 𝑠 = −
1
𝑇
y un polo en 𝑠 = −
1
𝛼𝑇
, como <1, se ve que el cero
siempre está ubicado a la derecha del polo en el plano complejo.
Se hace notar que para un valor pequeño de 𝛼 el polo esta ubicado lejos hacia la
izquierda. El valor mínimo de 𝛼 esta limitado por la construcción física de la red de
adelanto normalmente se toma como valor mínimo de 𝛼 aproximadamente a 0.07.
Si el valor de 𝛼 es pequeño, se hace necesario colocar un amplificador en casada
para compensar la atenuación de la red de adelanto.
En la figura 2 .8, muestra el diagrama polar de:
Para un valor dado de , el ángulo entre el eje real positivo y la línea tangente
trazadas del origen hasta la semicircunferencia, dado el ángulo de adelanto de fase
máxima
m
. Se denomina
m
a la frecuencia en el punto de tangencia el ángulo. De
la figura 2 .8, el ángulo de fase en
m
es:
𝑀
Esta ecuación relaciona el ángulo de adelanto máximo de fase y el valor de 𝛼.
Figura 2.8.- Diagrama polar de una red de adelanto 𝛼
𝑗𝜔𝑇+ 1
𝑗𝜔𝛼𝑇+ 1
ser positivo por la red de adelanto si el nuevo lugar de las raíces ha de pasar
por los lugares deseados para los polos dominantes de lazo cerrado.
- Si no se especifican los coeficientes de error estático se determina la
ubicación del polo y cero de la red de adelanto, de manera que la red de
adelanto contribuya el ángulo necesario φ y necesite la mínima cantidad de
ganancia adicional. (si se especifica un coeficiente estático de error
determinado, generalmente es más conveniente utilizar el método de
respuesta de frecuencia.
- se determina la ganancia de lazo abierto del sistema compensado con la
condición de modulo.
Una vez diseñado un compensador, se le verifica para ver si cumple con todas las
características de funcionamiento que debe tener uno, (el uso de software de apoyo
como herramienta, facilita la tarea de verificación de las características de respuesta
de frecuencia).
Si el sistema compensado no cumple con las especificaciones del funcionamiento,
se repite el procedimiento de proyecto ajustado del polo y el cero del compensador
hasta que se cumpla con todas las especificaciones.
2.2.1 Compensador de adelanto y LGR
Ejemplo de compensador en adelanto basado en el lugar geométrico de la raíz.
Determine el compensador en serie en adelanto basado en el procedimiento del
lugar de las raíces. Que modifique 𝜔
𝑛
de 2 a 4 radianes por segundo, sin modificar
los demás parámetros.
La planta tiene el modelo siguiente:
𝑛
2
𝑛
Solución:
Figura 2 .9.- Sistema de lazo cerrado.
GsH s
Gs
R s
Cs
Donde: H ( s ) 1 ;
s s
ss
G s
2
2
2
2
s s
s s
s s
Rs
C s
1 , 2
𝑛
𝑛
2
𝑛
1 , 2
2
Como
esta entre 0 y 1 tenemos un sistema subamortiguado.
Se desea modificar
n
de
s
rad
2 a
s
rad
Sin modificar
(coeficiente de amortiguamiento). G P
(s)
Figura 2 .10.- Compensador en serie.
𝐶
𝑇𝑠+ 1
𝛼𝑇𝑠+ 1
𝑐
𝑠+
1
𝑇
𝑠+
1
𝛼𝑇
Para
T T
compensador en adelanto.
𝑛
Con estos datos se obtiene un nuevo polinomio característico y de este obtenemos
los polos dominantes. Una vez más del modelo:
2
𝑛
𝑛
2
2
2
2
El polinomio característico es
2
𝑛
𝑛
2
Las raíces del polinomio característico son los polos de este sistema de segundo
orden, aplicando el modelo general para la obtención de las raíces de un polinomio
de segundo grado.
Para obtener el valor del cero y del polo del compensador, se siguen los pasos
siguientes:
- Se une el polo dominante con el origen:
- Se traza a partir del polo dominante una recta paralela al eje real:
- Se bisecta el ángulo entre estas 2 rectas:
- Se traza una recta
grados a la derecha de esta bisectriz y el valor del
cruce con el eje real da el valor del Zero.
El ángulo
es el ángulo que se va a compensar.
- Se traza una recta
grados a la izquierda de esta bisectriz y el valor del
cruce con el eje real da el valor del polo.
- Para obtener el valor del ángulo a compensar
se usa la condición del
ángulo del lugar de la raíz: ∠𝐺
𝐶
( 𝑠
) 𝐺
𝑃
( 𝑠
) = ± 180
0
Para este problema se tiene: H(s)=1; 𝐺
𝐶
𝑃
Entonces:
𝐶
𝑃
0
𝐶
0
𝑃
El ángulo del compensador GC(s) se debe obtener para el polo dominante:
1
s p
c
G s
1
0
s p
G s
1
sp
P
G s
1
s p
s s
1
s p
s p 1
s
1
s p
s
Como el polo dominante 2 2 3
1
p j entonces se hace la evaluación:
4
0
2 23
s J
s
1 0 0 0
2 23
2 2 3 tan
j
s J