Baixe Análise Arranjo Estrutural Controladores Comerciais - Apostilas - Engenharia de Aquicultura e outras Notas de estudo em PDF para Tratamento de Água, somente na Docsity!
UNIVERSIDADE TECNOLÓGICA FEDERAL DO PARANÁ
PROGRAMA DE PÓS-GRADUAÇÃO
DEPARTAMENTO ACADÊMICO DE ELETRÔNICA
ESPECIALIZAÇÃO EM AUTOMAÇÃO INDUSTRIAL
FELIPE IWASSE
ANÁLISE DOS ARRANJOS ESTRUTURAIS DE CONTROLADORES COMERCIAIS
MONOGRAFIA - ESPECIALIZAÇÃO
CURITIBA
FELIPE IWASSE
ANÁLISE DOS ARRANJOS ESTRUTURAIS DE CONTROLADORES COMERCIAIS
Monografia de conclusão do curso de Especialização em Automação Industrial do Departamento Acadêmico Eletrônica da Universidade Tecnológica Federal do Paraná apresentada como requisito parcial para obtenção do grau de Especialista em Automação Industrial.
Orientador: Prof. Dr. Sérgio Leandro Stebel
CURITIBA
2009
RESUMO
IWASSE, Felipe. Análise dos Arranjos Estruturais de Controladores Comerciais. 2009. 50 f. Monografia (Especialização em Automação Industrial) - Programa de Pós-Graduação em Automação industrial, UTFPR, Curitiba.
Este trabalho tem por objetivo estudar as formas dos arranjos estruturais dos controladores comerciais. Comparando os resultados coletados a partir de uma simulação (via Matlab/Simulink) da aplicação de cada controlador comercial a um sistema térmico, sistema recomendado para melhor análise dos controladores. Cada controlador foi sintonizado conforme a sugestão dos manuais ou das literaturas de controle. A finalidade desse trabalho é mostrar a forma estrutural dos principais controladores comerciais. Essa análise servirá para melhor compreensão aos futuros Engenheiros de Controle e Automação quanto às diversas formas de aplicação do controlador PID, podendo melhorar o desempenho do processo fabril.
Palavras-Chaves:
PID Matlab/Simulink Controle
ABSTRACT
IWASSE, Felipe. Análise dos Arranjos Estruturais de Controladores Comerciais. 2009. 50 f. Monografia (Especialização em Automação Industrial) - Programa de Pós-Graduação em Automação industrial, UTFPR, Curitiba.
This research has the goal of studying the ways of the structural arrangements of the commercial controllers. Comparing the results collected from a simulation (by Matlab / Simulink) from an implementation of each commercial controller to a thermal system, recommended system for better analysis of the controllers. Each controller was syntonized according to the manual suggestion of the control literatures. The purpose of this research is to show the structural form of the main commercial controllers. This analysis will serve to a better understanding for futures Automation and Control Engineers about the several application of PID controller, which can improve the performance of the manufacturing process.
Key Words:
PID Matlab/Simulink Control
Figura 3.8 – Diagrama de blocos da aplicação do controlador PID paralelo ideal com filtro derivativo. .......................................................................................................................... 42
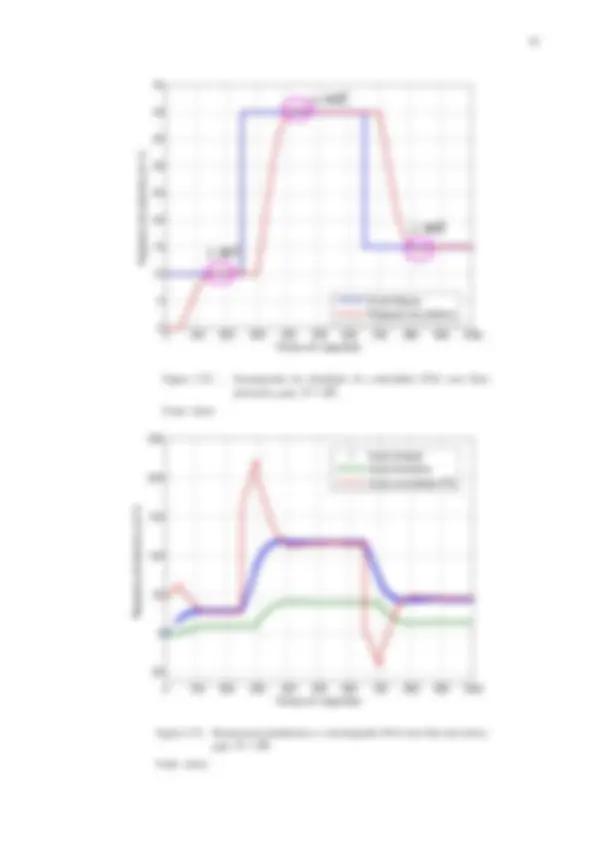
Figura 3.9 – Desempenho da simulação do controlador PID paralelo ideal com filtro derivativo, para N = 2. ..................................................................................................... 43
Figura 3.10 – Resposta dos parâmetros e o desempenho do controlador PID paralelo ideal com filtro derivativo, para N = 2. .................................................................................... 43
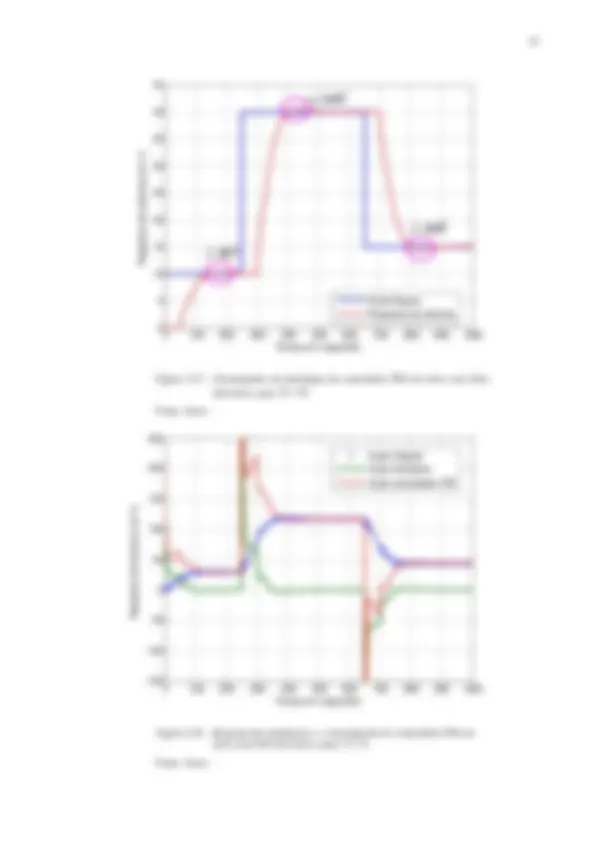
Figura 3.11 - Desempenho da simulação do controlador PID paralelo ideal com filtro derivativo, para N = 8. ...................................................................................................... 44
Figura 3.12 - Resposta dos parâmetros e o desempenho do controlador PID paralelo ideal com filtro derivativo, para N = 8. ..................................................................................... 45
Figura 3.13 - Detalhe da resposta dos parâmetros e o desempenho do controlador PID paralelo ideal com filtro derivativo, para N = 8. .............................................................. 45
Figura 3.14 – Desempenho da simulação do controlador PID paralelo ideal com filtro derivativo, para N = 20. ................................................................................................... 46
Figura 3.15 – Resposta dos parâmetros e o desempenho do controlador PID paralelo ideal com filtro derivativo, para N = 20. .................................................................................. 47
Figura 3.16 - Detalhe da resposta dos parâmetros e o desempenho do controlador PID paralelo ideal com filtro derivativo, para N = 20. ............................................................ 47
Figura 3.17 –Diagrama de blocos da aplicação do controlador PI-D com filtro derivativo..... 49
Figura 3.18 – Desempenho da simulação do controlador PI-D com filtro derivativo, para N = 2. ............................................................................................................................... 50
Figura 3.19 - Resposta dos parâmetros e o desempenho do controlador PI-D com filtro derivativo, para N = 2. ..................................................................................................... 50
Figura 3.20 – Desempenho da simulação do controlador PI-D com filtro derivativo, para N = 8. ................................................................................................................................ 51
Figura 3.21 - Resposta dos parâmetros e o desempenho do controlador PI-D com filtro derivativo, para N = 8. ...................................................................................................... 52
Figura 3.22 – Desempenho da simulação do controlador PI-D com filtro derivativo, para N = 20. ............................................................................................................................. 53
Figura 3.23 - Resposta dos parâmetros e o desempenho PI-D com filtro derivativo, para N = 20. ............................................................................................................................. 53
Figura 3.24 – Diagrama de blocos da aplicação do controlador PID em série com filtro derivativo. .......................................................................................................................... 55
Figura 3.25 – Desempenho da simulação do controlador PID em série com filtro derivativo, para N = 2 ......................................................................................................................... 55
Figura 3.26 – Resposta dos parâmetros e o desempenho do controlador PID em série com filtro derivativo, para N = 2. ............................................................................................ 56
Figura 3.27 – Desempenho da simulação do controlador PID em série com filtro derivativo, para N = 8. ........................................................................................................................ 57
Figura 3.28 – Resposta dos parâmetros e o desempenho do controlador PID em série com filtro derivativo, para N = 8. .............................................................................................. 57
Figura 3.29 – Desempenho da simulação do controlador PID em série com filtro derivativo, para N = 10. ........................................................................................................................ 58
Figura 3.30 – Resposta dos parâmetros e o desempenho do controlador PID em série com filtro derivativo, para N = 20. ............................................................................................ 59
LISTA DE ABREVIATURAS
BP Banda Proporcional CC Cohen e Coon CHR Chien, Hrones e Reswick IAE Integral of Absolute value Error ITAE Integral Time of Absolute value Error P Proporcional PD Proporcional Derivativo PI Proporcional Integral PID Proporcional Integral Derivativo PV Variável Controlada SISO Single Input Single Output SP Set-point SS1 Sobre Sinal 1 SS2 Sobre Sinal 2 SS3 Sob Sinal 3 Z&N Zigler e Nichols
LISTA DE SÍMBOLOS
A Variável da sintonia da Integral do Erro B Variável da sintonia da Integral do Erro C Variável da sintonia da Integral do Erro D Variável da sintonia da Integral do Erro E Variável da sintonia da Integral do Erro e s ( ) Sinal do erro em função de “s” e t ( ) Sinal do erro em função do tempo F Variável da sintonia da Integral do Erro FD t ( ) Filtro derivativo em função do tempo FD s ( ) Transformada de Laplace do filtro derivativo G Primeiro sobre-sinal Gp Função de transferência de um processo de primeira ordem H Variação do processo J Segundo sobre-sinal Kd Ganho derivativo Ki Ganho integral Kp Ganho proporcional Ku Último ganho calculado N Parâmetro do filtro derivativo P 0 Polarização inicial Pu Ultimo período observado R Ângulo de inclinação s Variável Transformada de Laplace Ta Tempo de assentamento ou tempo de regime permanente Td Tempo derivativo Ti Tempo integral Ts Tempo de subida Tm Tempo morto u s ( ) Sinal de saída do controlador em função de “s” u t ( ) Sinal de saída do controlador em função do tempo y s ( ) Saída do sistema em função de “s”
λ Constante de tempo em malha fechada
θ Constante de tempo em malha aberta
8
1. INTRODUÇÃO
1.1 TEMA
No século XXI os controladores PID continuam a ser um componente fundamental nos variados processos industriais devido a sua aplicabilidade e numa ampla gama de condições de operações, principalmente nos processos petroquímicos, alimento, cerâmica, siderúrgica, celulose e papel, têxtil, geração de energia elétrica, entre outros (BEGA, 2006, p.1). Hoje, muitas empresas aplicam os controladores de forma ineficaz (TORRES; JOTA; PENA, 2000, p1). Mesmo conhecendo a ação e estratégias de um controlador PID regulatório, muitos não conhecem a variação da estruturação ou a posição dos ganhos dos controladores. Por isso, foram criados diversos arranjos estruturais de controle a fim de superar os limites operacionais ou aperfeiçoar os processos industriais. Os arranjos estruturais dos controladores PID estão mudando conforme a necessidade industrial. Devido a essa necessidade, muitos controladores estão sendo aperfeiçoados, incluindo vários algoritmos como adaptativo, preditivo e fuzzy , a fim de melhorar seu desempenho. Embora as ações de controle não mudassem, mas apenas um reposicionamento dos ganhos do controlador para melhor aplicabilidade (QUEVEDO; ESCOBET, 2000, p1-2). Este trabalho analisará o desempenho e os arranjos estruturais de vários controladores PID comerciais aplicados a um sistema térmico. Este sistema foi escolhido para melhor avaliação dos controladores. Cada controlador foi simulado no software Matlab/Simulink, onde foram adquiridos os dados necessários para comparar, avaliar o comportamento e o desempenho entre eles. Essa comparação tem por objetivo esclarecer melhor a ação de cada controlador em que os profissionais devem escolher o controlador mais conveniente para sua implementação.
9
1.2 OBJETIVOS
1.2.1 Objetivos Gerais
Analisar os arranjos estruturais dos controladores, através de uma simulação via software Matlab, mostrando as diferentes respostas dos controladores.
1.2.2 Objetivos Específicos
- Demonstrar a variedade da disposição das estruturas e dos arranjos dos ganhos dos controladores comerciais.
- Levantar a equação que descreve a saída de cada um dos controladores.
- Implementar cada controlador no software Matlab/Simulink.
- Simular a aplicação de cada controlador a um sistema térmico.
- Analisar o desempenho das formas estruturais dos controladores comerciais.
1.3 JUSTIFICATIVA
Os controladores PID vêm sendo usados por muitos anos, embora seu conceito seja básico, muitos dos controladores não estão sendo utilizados corretamente. Esse trabalho tem por finalidade criar uma percepção do funcionamento dos ganhos dos controladores de acordo com sua estruturação interna e aprimorar o conhecimento (visando sua aplicabilidade) dos futuros engenheiros.
1.4 ESTRUTURA DO TRABALHO
Este trabalho está dividido em 4 (quatro) capítulos, sendo: No Capítulo 1, introdutório deste trabalho, foi transcrito o tema central, objetivo geral e específico, a justificativa da escolha do tema e a metodologia de pesquisa que foi empregada. No Capítulo 2, foi descrito cada fundamento teórico: ganho do controlador PID clássico, Ganho Proporcional, Ganho Derivativo, Ganho Integral. Foi mostrado, também, a função de
11
2. FUNDAMENTAÇÃO TEÓRICA
2.1 CONTROLADOR P, PI, PD E PID
Atualmente os controladores PID vêm sendo utilizados em larga escala nos processos industriais: refinarias, planta químicas, celulose, entre outros. Hoje existem vários tipos, modelos de controladores: controlador robusto, on-off , preditivo, redes neurais, entre outros; embora os mais empregados, conforme Campos (2006, p.23), são:
- Controlador Proporcional (P).
- Controlador Proporcional e Integral (PI).
- Controlador Proporcional e Derivativo (PD).
- Controlador Proporcional, Integral e Derivativo (PID). Em geral, os sistemas de controle são mostrados por um diagrama de bloco, com objetivo de representar através de blocos funcionais as funções de cada componente contido em um sistema/processo, indicando o fluxo de sinais do sistema real (OGATA, 2003, p.49). O diagrama de blocos simplificado, conforme mostrado na figura 2.1 permite avaliar o comportamento de cada ganho do controlador PID para o desempenho do sistema em malha fechada. Qualquer sistema de controle linear pode ser representado por diagrama de blocos (OGATA, 2003, p. 50).
Figura 2.1 – Diagrama de Blocos da representação de um sistema em malha fechada. Fonte: Autor
O sinal de saída (medido por um sensor) é realimentado ao bloco somador, que compara o sinal de entrada, formando o erro. Essa comparação é aplicada na entrada do controlador que detecta o erro atuante, amplificando a um nível suficientemente alto. O sinal de controle é aplicado à planta (a um atuador), obtendo o produto final. A relação entre o sinal de saída com o sinal de entrada é denominado lei de controle (BOLTON, 1995, p.340). Atualmente, os controladores são classificados de acordo com sua aplicação: controlador pneumático, hidráulico ou eletrônico, e escolhido de acordo com sua segurança,
12
precisão, peso e tamanho (OGATA, 2003, p.53). A tabela 2.1 mostra resumidamente a características e aplicações das ações de controle dos controladores convencionais para processos estáveis.
Controlador Característica Aplicação P Apresenta erro de regime permanente. (^) líquidos e pressão de gás.Controle de nível de PI Não possui erro de regime permanente,sistema sensível. Controle de vazão, nível e pressãode líquidos e pressão de vapor.
PD
Instável para processos rápidos, resposta rápida com menor erro de regime permanente, aumenta a estabilidade de controle.
Controle de pressão de vapor e nível de líquido.
PID
Resposta mais estável, tempo morto baixo, maior dificuldade para sintonizar.
Controle de composição, pH, temperatura e pode ser utilizado em controle de pressão de gás, nível de líquidos. Tabela 2.1 – Comparação das ações de controle de Controladores Convencionais. Fonte: BEGA (2006, p.473) e CAMPOS, et al (2006, p.42).
2.1.1 Controlador Proporcional (P)
O controlador proporcional é composto de apenas um ganho ( Kp ), que atua
diretamente no erro do sistema (diferença entre o sinal de entrada SP e o sinal de saída PV ), sua ação é de velocidade, ou seja, o tempo de estabilidade é pequeno. O algoritmo de posição é dado pela equação 1.
u t ( ) = Kp × e t ( ) + P 0 (1)
Onde: u t ( ) - Sinal de saída do controlador. P 0 - Polarização inicial. e t ( ) - Sinal do erro. Kp - Ganho proporcional. A equação 2 mostra a definição do erro para ação reversa e a equação 3 define o erro para ação direta.
e t ( ) = SP − PV (2) e t ( ) = SP + PV (3)
14
-0.5 0 0.5 1 1.5 2 2.5 3 3.5 4 4.5 5
0
1
2
3
Tempo em segundos
Ação Proporcional
Erro Sinal Controlador Kp= Sinal Controlador Kp=
Figura 2.4 – Resposta do Controle Proporcional a partir de um erro. Fonte: Autor. A partir da resposta da simulação, observa-se que quanto maior for o valor do ganho, maior será a ação de controle. Embora quanto mais alto for o valor desse ganho terá mais oscilações e maior o tempo de estabilização do processo (BEGA, 2006, p.465). O ajuste do ganho pode ser realizado manualmente ou de forma automática. Na maioria o ajuste é automático, caso o processo sofra uma variação de carga ou a variação no processo seja muito grande e rápida, a ação proporcional não retornará ao valor desejado, tal diferença entre a variável estabilizada e o valor desejado chama-se erro de regime permanente. Embora muitos processos não admitam erro de regime permanente e nem oscilações em torno do valor desejado, outras ações de controle são, então, utilizadas (BEGA, 2006, p.465).
2.1.2 Controlador Proporcional Integral (PI)
O controlador PI é composto pelo ganho proporcional ( Kp ) e pelo ganho integral ( Ki ).
A função da ação do termo integral é eliminar o erro em regime permanente, logo essa ação aumenta o tempo de estabilidade. Em geral esse controlador apresenta baixo sobre-sinal e tempo de subida e estabilidade elevado. Na equação 5, mostra o algoritmo do controlador PI paralelo clássico.
15
0 u t ( ) Kp e t ( ) Kp^1 e t dt ( ) P
= × + × Ti × ∫ + (5)
Onde: u t ( ) - Sinal de saída do controlador. P 0 - Polarização inicial. e t ( ) - Sinal do erro e t ( ) = SP − PV ou e t ( ) = SP + PV. 1 Ti - Taxa de integração. Kp - Ganho proporcional. A ação integral é dado como número de repetições por minutos ou minutos por repetições. Alguns fabricantes definem Ti como tempo integral em segundos ou minutos, 1/ Ti como reset (inverso do tempo integral), taxa de integração ( reset rate ) ou tempo de repetição (OGATA, 1997, p.216); e utilizam o ganho Ki (multiplicação do termo proporcional com integral Ki = Kp Ti / ) (CAMPOS; et al, 2006, p.26).
O diagrama de bloco mostrado na figura 2.5 é a estrutura do controlador proporcional integral (PI) paralelo clássico, conforme a equação 5.
Figura 2.5 – Diagrama de blocos do Controlador PI aplicado a um sistema. Fonte: Autor.
Para compreender melhor, o diagrama de blocos mostrado na figura 2.6 foi simulado no software Matlab para verificar a ação de controle; analisando a partir do sinal do erro (degrau unitário) até o sinal da saída da planta.